Discovery C2 Four Wheel Differential Platform


Product Briefing
The Discovery series is a small economical robot platform. It aims to provide users with a complete mobile robot system with high reliability and multiple interfaces. Discovery C2 is the robot platform with two HSL-10 inflatable rubber driving wheels and two HSL-10 inflatable rubber driven wheels, equipped with a powerful drive system, which can adapt to all kinds of working environment and complete all kinds of sports efficiently. Discovery C2 uses high-power coreless motor as the driver, equipped with multi-axis servo driver and the advanced motion controller, which integrates various motion control function, making both CAN bus and RS232 interface available. The development kit provides customers with a complete equipment communication protocol, and also provides examples and demo application source code based on STM32F407, which allows users quickly know how to operate Discovery C2.
Video Display
Product Characteristics
- Four wheel independent drive
- Design of Wheel System with Bearing Seat
- Industrial grade rubber tires
- Hollow cup DC servo motor
- Servo drive
- DEMO development board and application code
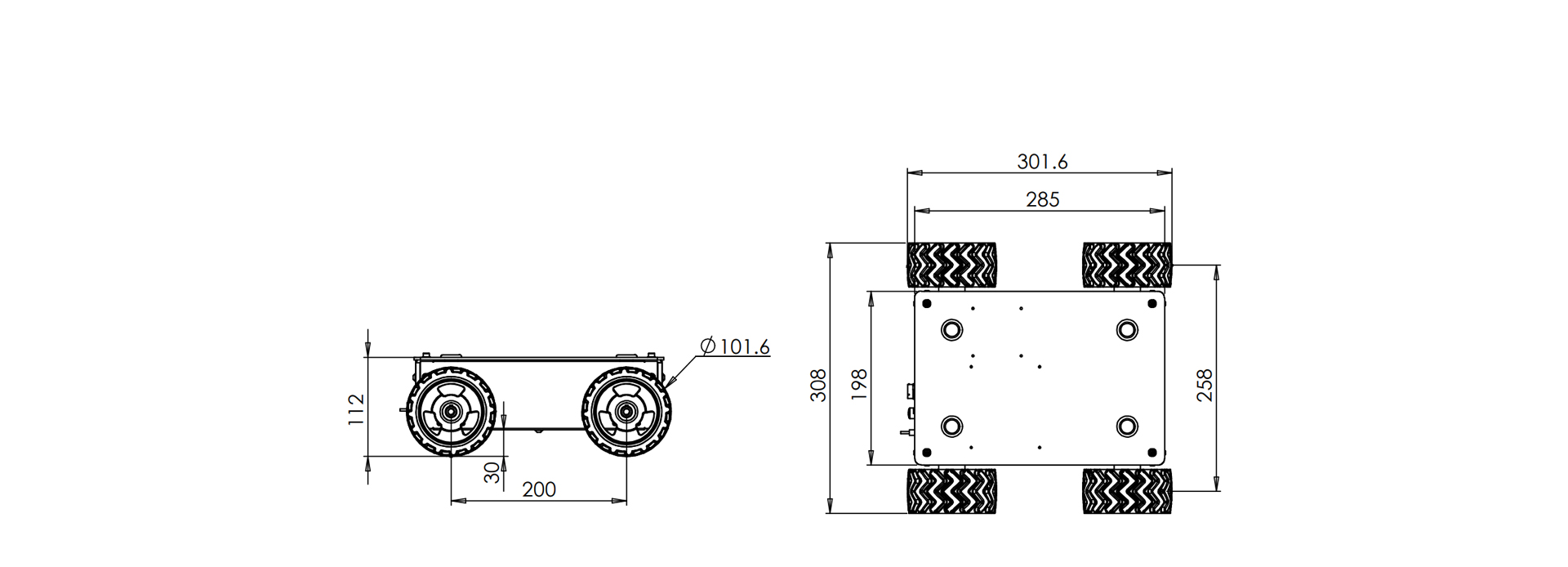
Exterior Dimension
Specification Parameters
| Fuselage Form | Sheet metal assembly molding | Overall Dimension | 301.6×308×112 |
| Driving Wheel | HSL-10 Rubber Wheel | Diameter of Driving Wheel | 101.6mm |
| Driving Method | Four-wheel independent drive | Suspension Form | No suspension |
| Minimum Ground Clearance | 30mm | Weight | 5.6kg |
| Rated load Capacity | 15kg | Motor Type | Hollow Cup DC Servo Motor |
| Motor Rated Power | 17W | Motor Encoder | 12 lines/revolution, A and B phase outputs |
| Number of Motors | 4 | Motor Drive | Servo drive, CAN bus, RS232 communication interface |
| Maximum Travel Speed | 0.65m/s | Maximum Rotation Speed | 160°/s |
| Minimum Turning Radius | 0m | Adaptable Terrain | Indoor and outdoor general pavement and dirt pavement |
| Typical Endurance | Approx. 8h (load 5kg, operating speed 0.5m/s, operating rate 70%) | Standby Time | >30h |
| On-board Power Output | 5V@2.5A×2 way /Battery voltage (9.6~12.6V)@>5A | Power Fuse Preset Specification | 5×20/10A |
| Battery | 12V/10.4Ah lithium-ion battery | Battery Quick Change | Support |
| Charger | Input:AC220V~240V / Charging current:3A / Interface:Plug-in type | Accessory | Battery charger, ULB-1 ultrasonic transducer × 3 |
| DEMO Board | RHF407 development board (CAN×2, RS232×2, TTL×1, RS485×1, SPI×1, I2C×1, ADC×8, DAC×2, PWM×8, LED×2, keypad×2, independent I/O×24, reusable I/O×29, TF card interface×1, RTC backup battery holder, reusable TFT LCD interface×1) | ||
| Fuselage Form | Sheet metal assembly molding | ||
| Driving Wheel | HSL-10 Rubber Wheel | ||
| Driving Method | Four-wheel independent drive | ||
| Minimum Ground Clearance | 30mm | ||
| Rated load Capacity | 15kg | ||
| Motor Rated Power | 17W | ||
| Number of Motors | 4 | ||
| Maximum Travel Speed | 0.65m/s | ||
| Minimum Turning Radius | 0m | ||
| Typical Endurance | Approx. 8h (load 5kg, operating speed 0.5m/s, operating rate 70%) | ||
| On-board Power Output | 5V@2.5A×2 way /Battery voltage (9.6~12.6V)@>5A | ||
| Battery | 12V/10.4Ah lithium-ion battery | ||
| Charger | Input:AC220V~240V / Charging current:3A / Interface:Plug-in type | ||
| Overall Dimension | 301.6×308×112 | ||
| Diameter of Driving Wheel | 101.6mm | ||
| Suspension Form | No suspension | ||
| Weight | 5.6kg | ||
| Motor Type | Hollow Cup DC Servo Motor | ||
| Motor Encoder | 12 lines/revolution, A and B phase outputs | ||
| Motor Drive | Servo drive, CAN bus, RS232 communication interface | ||
| Maximum Rotation Speed | 160°/s | ||
| Adaptable Terrain | Indoor and outdoor general pavement and dirt pavement | ||
| Standby Time | >30h | ||
| Power Fuse Preset Specification | 5×20/10A | ||
| Battery Quick Change | Support | ||
| Accessory | Battery charger, ULB-1 ultrasonic transducer × 3 | ||
| DEMO Board | RHF407 development board (CAN×2, RS232×2, TTL×1, RS485×1, SPI×1, I2C×1, ADC×8, DAC×2, PWM×8, LED×2, keypad×2, independent I/O×24, reusable I/O×29, TF card interface×1, RTC backup battery holder, reusable TFT LCD interface×1) | ||
Typical Components
-

HSL-10 inflatable rubber wheel
-

RHF407 development board
-

ULB-1 ultrasonic range-finding sensors
-

IMDR4 servo motor
-

Faulhaber3242coreless DC servo motor
Typical Research and Application Areas
- Pattern recognition technology research
- Electronic engineering experiment
- Carrying and storage applications
- Route planning technology research
- Mechanical engineering experiment
- Monitoring and investigation application
- Automatic driving technology research
- Embedded system development and experiment
- The robot competition
- Sensor technology research
- Image process technology research
- Mapping application
- Artificial intelligence research
- Multi-robot cooperation technology research
- Flexible manufactur system application
Optional Accessories
- HMC-1 remote control handle
- LPC-16 patrol sensor
- ULB-1 ultrasonic range-finding sensors
- Laser radar
- GPS locator
- Kinect device body sensor