In educational settings such as university laboratories, the challenge of managing heavy and precision equipment transportation persists. A large number of instruments used for teaching and research require frequent relocation, yet traditional methods prove cumbersome and difficult to maneuver, often leading to collisions. These methods struggle to achieve precise positioning in confined spaces and fail to ensure stable transport for delicate instruments. Manual handling is inefficient and poses safety risks. With the increasing emphasis on practical teaching and interdisciplinary collaboration, Hangfa Robotics’ clients urgently need to introduce an efficient, safe, flexible, and professional intelligent transport solution to enhance teaching and research productivity.
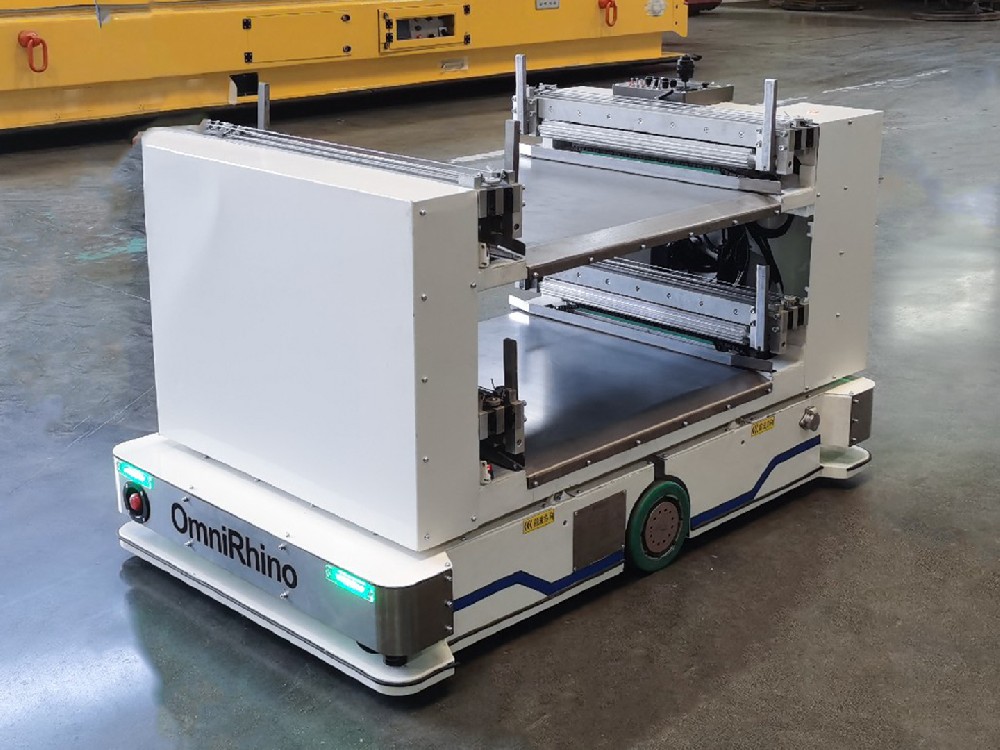
Hangfa Robotics developed an AGV (Automated Guided Vehicle) based on the OmniTurtle model, featuring a 100kg-capacity and equipped with a Mecanum wheel system. This design enables omnidirectional movement—including forward, lateral, diagonal, and in-place rotation—adapting seamlessly to narrow spaces while significantly improving accessibility and flexibility. With high positioning accuracy and integrated safety protection systems, the AGV enhances transport efficiency and safety, reduces risks of equipment damage and labor costs, and provides strong support for the efficient advancement of experimental teaching and scientific research innovation.
External dimensions | Lift stroke | Load capacity |
/ | / | 100kg |
Project Background:Based on the construction requirements of a small···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >
Project Background:Based on the construction requirements of a small···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >