Project Background:
In the mechanical manufacturing industry, large-scale equipment assembly, maintenance, inspection, and workshop logistics often involve aerial work demands. Traditional solutions primarily rely on fixed lifting platforms, scaffolding, or crane-assisted manual operations, which suffer from inflexibility in adapting to dynamic workpoints, time-consuming setup/removal of scaffolding with safety risks and space occupation, and crane operations requiring specialized personnel with limited coverage and precision control. For aerial material handling, tool delivery, or personnel-assisted tasks requiring 1-ton payload capacity, existing methods face challenges in efficiency, precision, safety, and flexibility. Customers of Hangfa Robotics urgently need smarter, more agile, and safer solutions.
Solution:
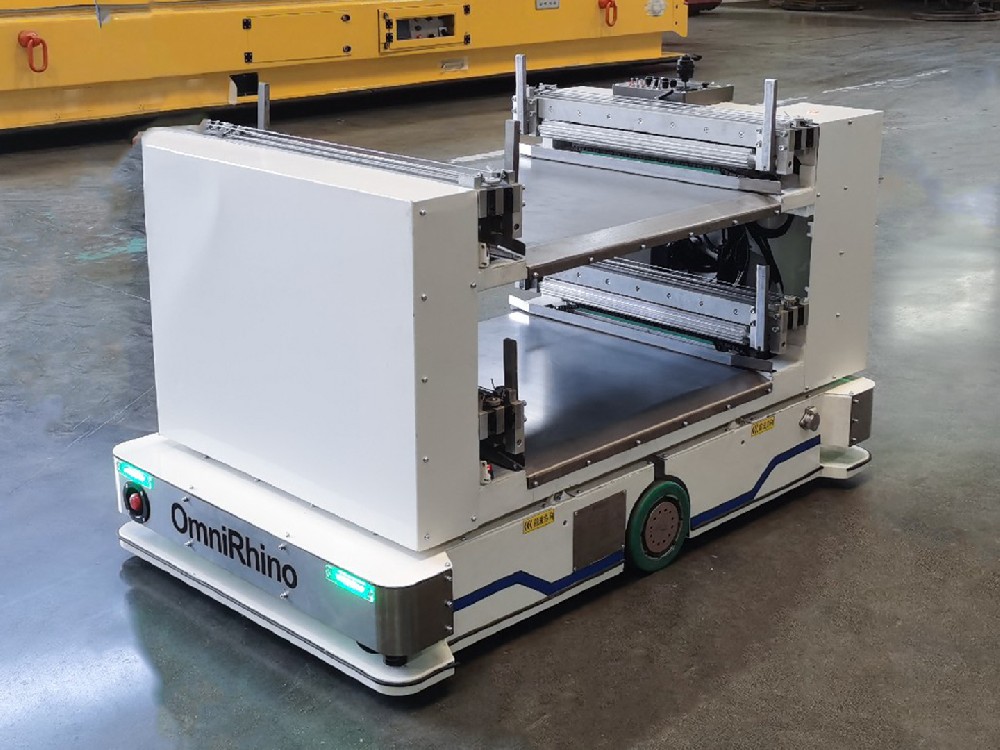
Hangfa Robotics developed a heavy-duty AGV based on the OmniTurtle model, with a 1-ton payload capacity. Featuring customized design and dual-vehicle coordinated operation capabilities, this AGV combines autonomous mobility with heavy-load lifting functionality. It reliably lifts 1-ton workpieces, tools, or operation platforms to required heights while ensuring stability and precise positioning throughout the lifting process. Its high autonomy and flexibility enable seamless adaptation to workshop environments. The AGV enhances automation and efficiency in aerial operations, reduces risks from manual climbing/handling, optimizes workshop logistics, and improves spatial utilization—ultimately establishing a safer, more flexible, and intelligent aerial work model that delivers core value for mechanical manufacturing enterprises.
External dimensions | Lift stroke | Load capacity |
/ | / | 1t(one vehicle)/ 2t(linkage) |
Project Background:Based on the construction requirements of a small···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >
Project Background:Based on the construction requirements of a small···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >