Project Background:
The traditional rail mounted mobile device with a robotic arm has a single working path and limited working range. The customer requires an AGV that can carry a robotic arm to move in any direction within the laboratory, reducing equipment investment and lowering maintenance and management costs.
Solution:
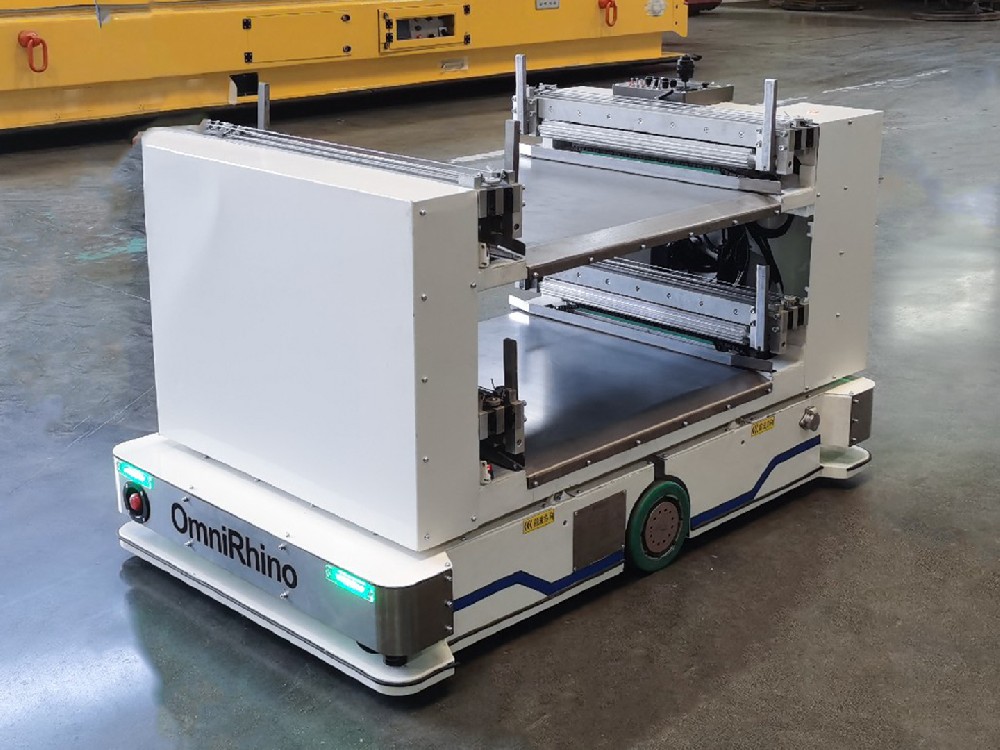
Hangfa has provided 2 OmniTurtle AGVs with a carrying capacity of 100kg. The wheel system consists of 4 sets of Mecanum wheels and 4 sets of fully active wheels, and is equipped with a joint card ZU7 cooperative robotic arm, which can move in any direction in the laboratory. Adopting a pendulum suspension structure, swing mechanical limits are set on both sides of the pendulum shaft to limit the maximum swing angle and ensure that the AGV does not tilt. Selecting DC brushless servo motors and drivers, using DC power supply, and no inverter system can improve energy conversion rate and reduce failure rate.
External dimensions | Lift stroke | Load capacity |
/ | / | 100kg |
Project Background:Based on the construction requirements of a small···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >
Project Background:Based on the construction requirements of a small···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >
#AGV #HeavyDutyAGV #HeavyDutyAGVManufacturer #AGVTransportVehicle #O···
More >